|
I am a second-year Computer Science Ph.D. student at NYU Courant advised by Professors Lerrel Pinto and Yann LeCun. Prior to NYU, I was a MS in Robotics student at CMU Robotics Institute advised by Professor Abhinav Gupta. I worked on enhancing robots' generalization capabilities and benchmarking. My thesis can be found here. Prior to CMU, I did my undergraduate in Computer Science and Applied Mathematics at UC Berkeley. During my time at Berkeley, I had the pleasure to work with Professors Sergey Levine and John DeNero in the Berkeley Artificial Intelligence Research (BAIR) Lab. Email / CV / Google Scholar / Github / Photography |

|
|
I am broadly interested in Robotics, Reinforcement Learning, and NLP. My motivation is to build agents with cognitive capabilities that can learn and infer like humans. |
|
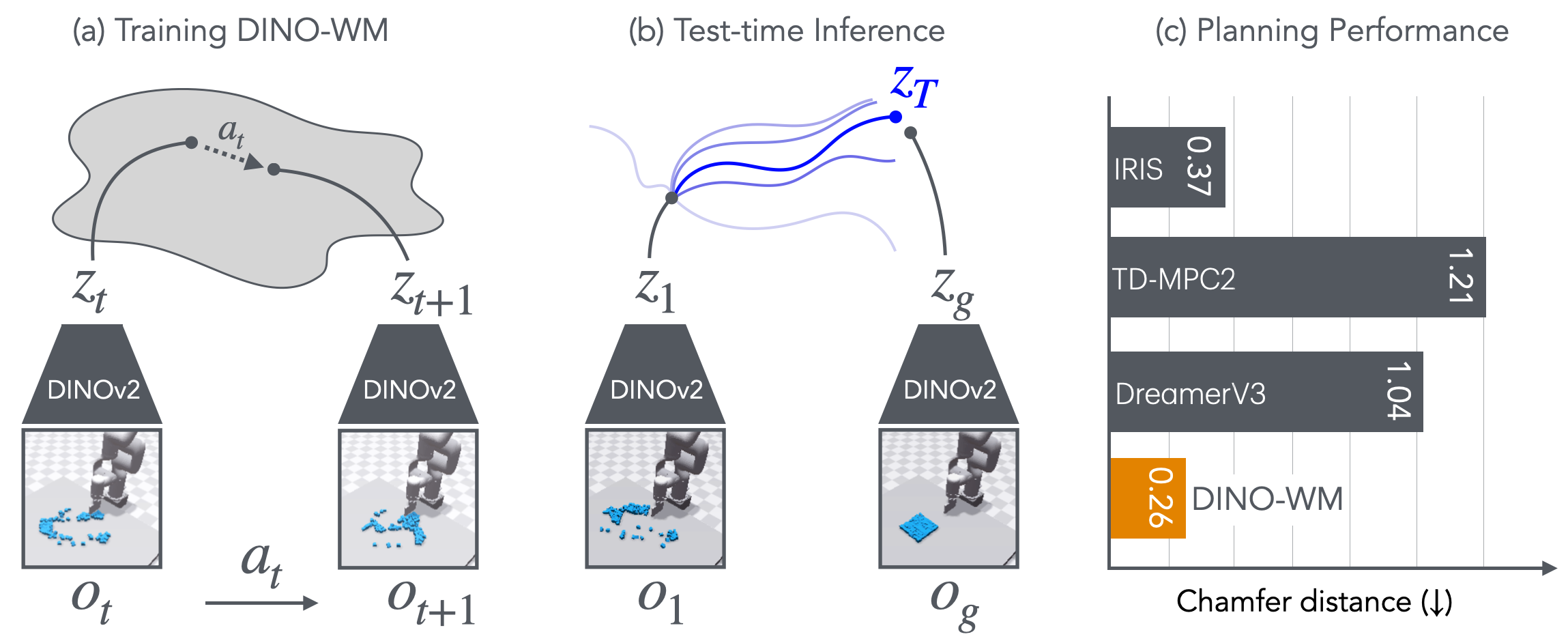
Gaoyue Zhou, Hengkai Pan, Yann LeCun, Lerrel Pinto ICML 2025 arXiv | code | project page We introduce a simple yet effective method for constructing versatile world models with pre-trained DINOv2 that generalize to complex environment dynamics, which enables zero-shot solutions at test time for arbitrary goals. |
|
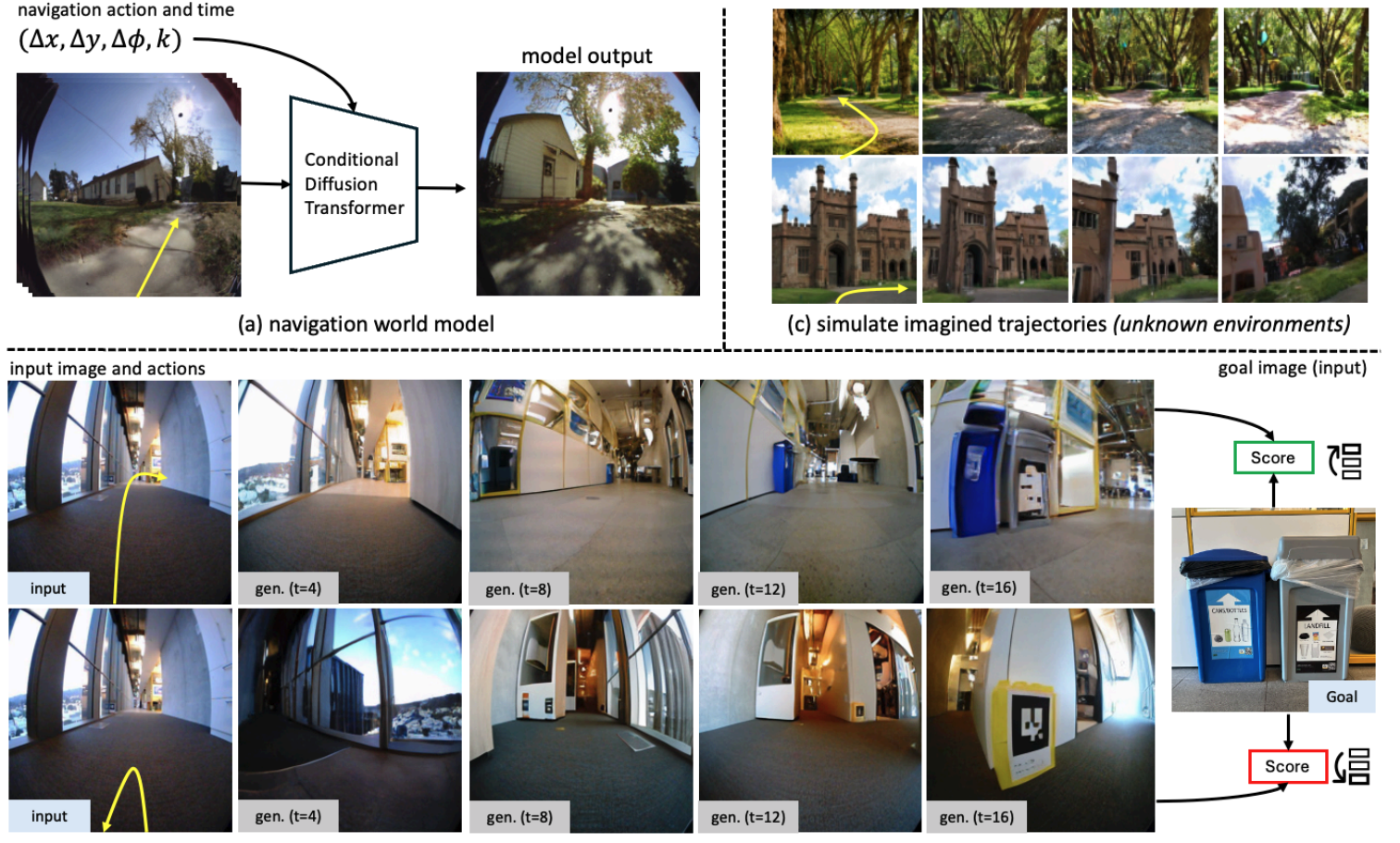
Amir Bar, Gaoyue Zhou, Danny Tran, Trevor Darrell, Yann LeCun CVPR 2025 (Best Paper Honorable Mention) arXiv | code | project page We train a video world model across diverse environments and embodiments, demonstrating its ability to plan novel trajectories in both known and unknown environments. |
|
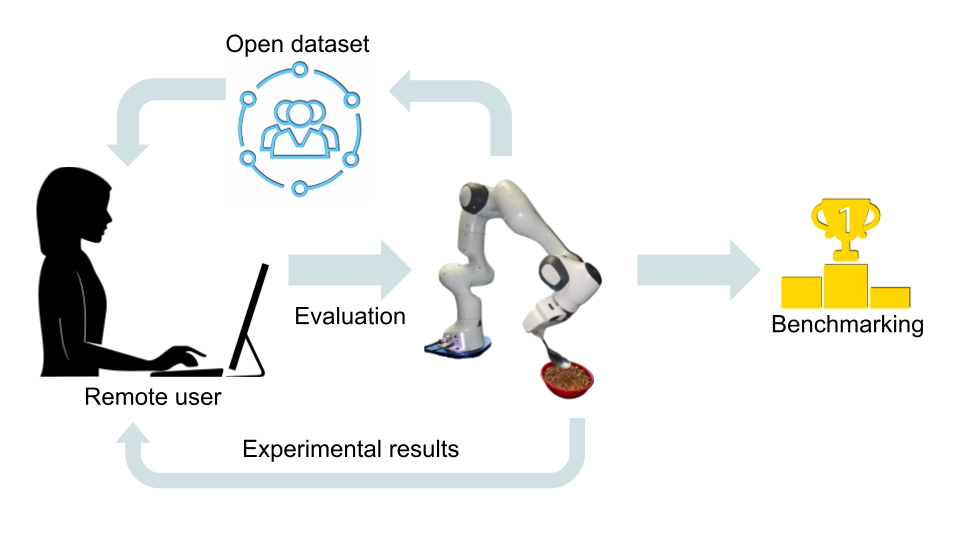
Gaoyue Zhou*, Victoria Dean*, Mohan Kumar Srirama, Aravind Rajeswaran, Jyothish Pari, Kyle Hatch, Aryan Jain, Tianhe Yu, Pieter Abbeel, Lerrel Pinto, Chelsea Finn, Abhinav Gupta Accepted to ICRA 2023 Best Paper Award at NeurIPS WBRC 2022 OpenReview | video | project page We introduce a new benchmark for tabletop manipulation: Train Offline, Test Online (TOTO) and showed performance of state-of-the-art models on two tasks. |
|
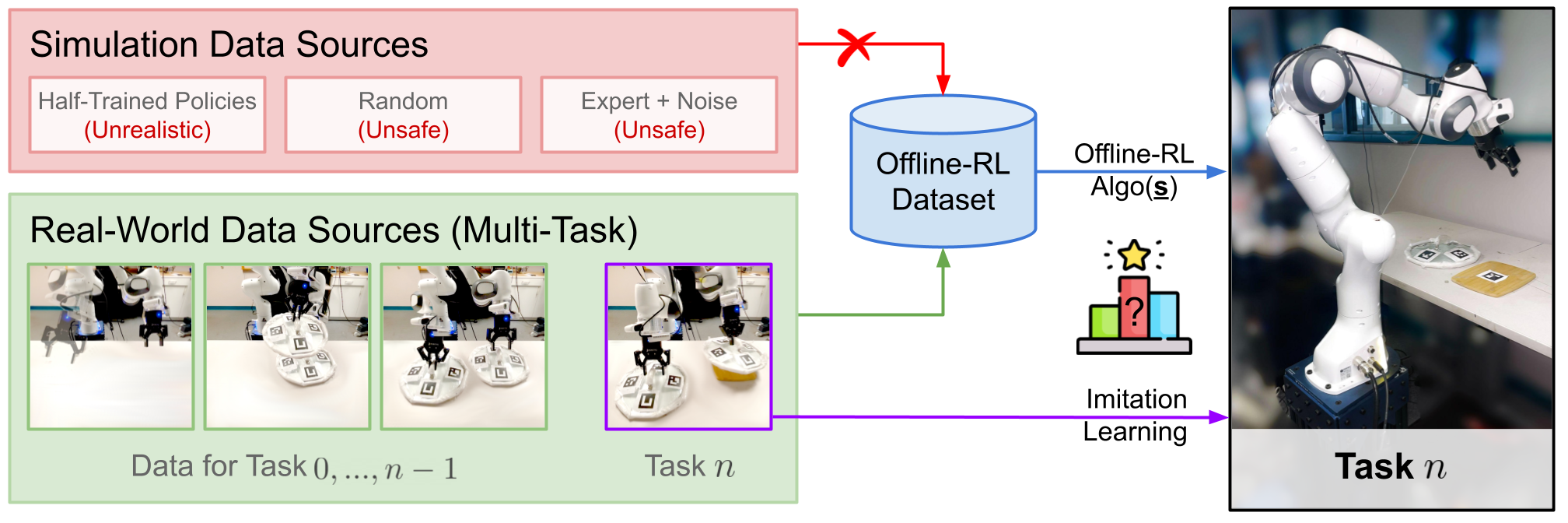
Gaoyue Zhou*, Liyiming Ke*, Siddhartha Srinivasa, Abhinav Gupta, Aravind Rajeswaran, Vikash Kumar Accepted to ICRA 2023 and 3 NeurIPS 2022 workshops arXiv | video | project page In this work, we evaluate Offline RL algorithms' performance on real robot, on in-domain tasks and transfer learning settings. |
|
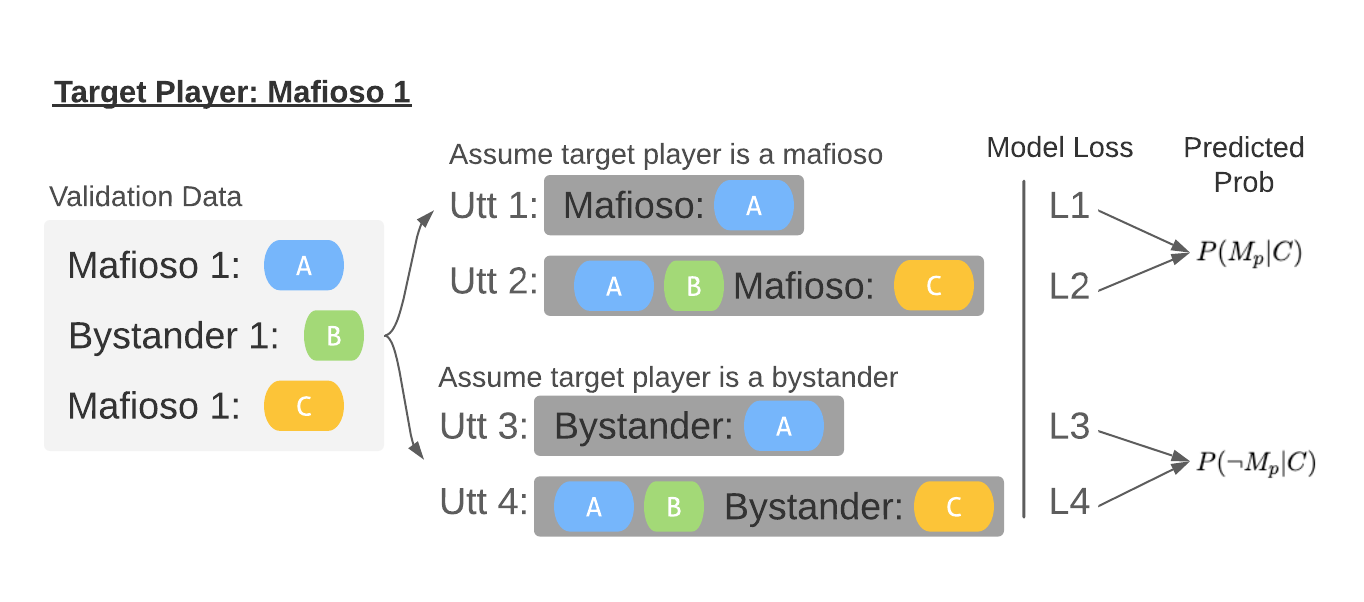
Samee Ibraheem*, Gaoyue Zhou*, John DeNero Annual Conference of the North American Chapter of the Association for Computational Linguistics (NAACL), 2022 Oral Presentation arXiv | video | project page In this paper, we collect and release a dataset for identifying deceptive actors through the game of Mafia, as well as train models to identify such actors and reveal features of their language. |
|
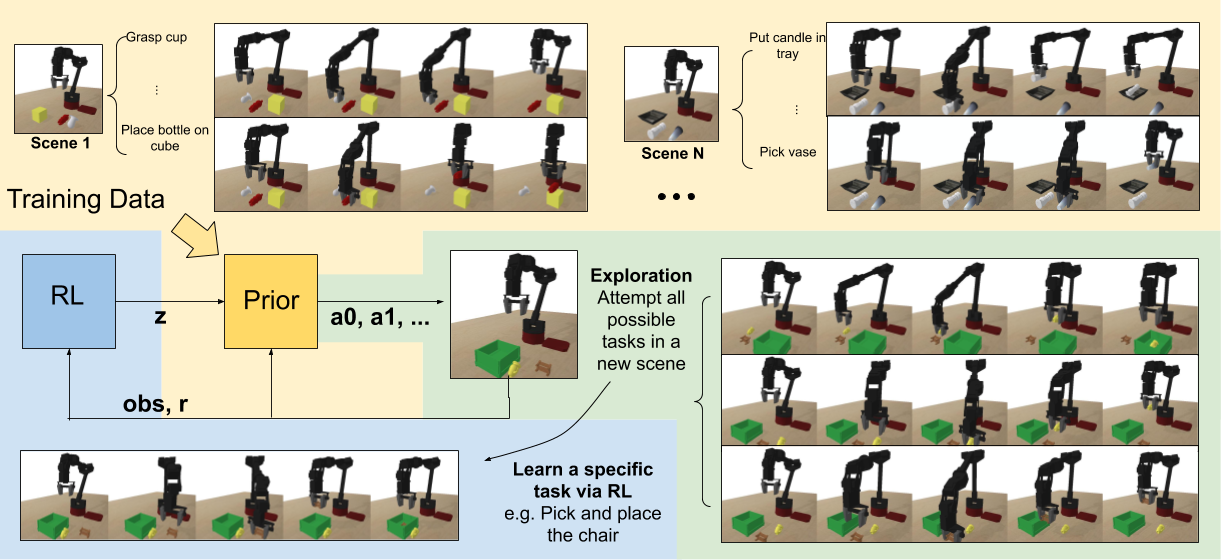
Avi Singh*, Huihan Liu*, Gaoyue Zhou, Albert Yu, Nicholas Rhinehart, Sergey Levine International Conference on Learning Representations (ICLR), 2021 Oral Presentation (top 1.8% of submissions) arXiv | video | project page We proposed a method for pre-training a behavioral prior for reinforcement learning using data from a diverse range of tasks, and used this behavioral prior to speed up learning of new tasks. |
|
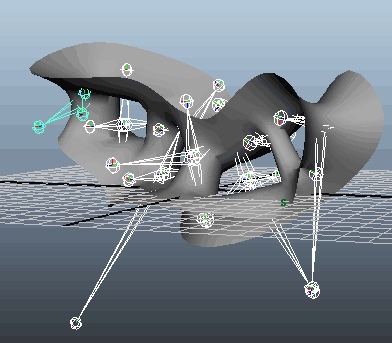
Advised by Prof. Carlo H. Séquin tech report We proposed various ways to use CAD Tools for the Procedural Generation of 2-Manifold Sculpture Geometries with high-level control. |
|
|
|
|
10725A: Convex Optimization , Fall 2022 |

|
CS 189: Introduction to Machine Learning , Fall 2020 EECS 16B (Designing Information Devices and Systems II) , Fall 2019, Spring 2020, Spring 2021 |
|
|